Robots Can Multitask Too: Integrating a Memory Architecture and LLMs for Enhanced Cross-Task Robot Action Generation

0

Sign in to get full access
Overview
- This paper presents a novel approach to enable robots to perform cross-task action generation by integrating a memory architecture with large language models (LLMs).
- The proposed system allows robots to leverage their past experiences and knowledge stored in the memory module to generate appropriate actions for new tasks, improving their versatility and adaptability.
- The authors demonstrate the effectiveness of their approach through experiments on various robot manipulation tasks, showcasing the system's ability to outperform baselines in terms of task completion and generalization to unseen scenarios.
Plain English Explanation
Robots are often designed to excel at specific tasks, but they can struggle when faced with new or unfamiliar situations. This paper explores a way to make robots more adaptable and capable of handling a wider range of tasks.
The key idea is to give the robot a "memory" that it can use to draw upon its past experiences and knowledge. By integrating this memory architecture with powerful language models, the robot can generate appropriate actions for new tasks, even if it hasn't encountered them before.
Imagine a robot that has learned how to do laundry, but then is asked to set the table for a meal. Without the memory and language model integration, the robot might struggle to figure out the right steps. But with this new system, the robot can recall its past experience with household tasks and use that knowledge to quickly adapt and set the table effectively.
The experiments in the paper show that this approach helps robots perform better on a variety of manipulation tasks, both in terms of successfully completing the tasks and being able to generalize to new, untrained situations. This could be a significant step towards making robots more versatile and capable of assisting humans in a wide range of everyday activities.
Technical Explanation
The paper presents a novel architecture that integrates a memory module with large language models (LLMs) to enable enhanced cross-task robot action generation. The key components of the system include:
-
Memory Module: This module stores the robot's past experiences and knowledge, including successful task completion sequences, failures, and contextual information. The memory is structured to allow efficient retrieval and reasoning.
-
Language Model Integration: The system incorporates a large, pre-trained language model that can understand natural language instructions and leverage the information stored in the memory module to generate appropriate robot actions for new tasks.
-
Action Generation: By combining the memory and language model components, the system can generate sequences of robot actions that are tailored to the specific task at hand, drawing upon relevant past experiences to inform the decision-making process.
The authors evaluate their approach on various robot manipulation tasks, such as object grasping and placement, and demonstrate its superiority over baseline methods in terms of task completion rates and generalization to unseen scenarios.
The memory architecture allows the robot to reuse and recombine its past knowledge, while the language model provides the necessary understanding of the task context and instructions. This integration enables the robot to reason more effectively and make better decisions when generating actions for new tasks.
Critical Analysis
The paper presents a promising approach to enhancing robot versatility and adaptability, but it also acknowledges several limitations and areas for future research:
-
Task Complexity: The experiments in the paper focus on relatively simple manipulation tasks. It remains to be seen how well the system would scale to more complex, multi-step tasks or tasks that require long-term planning and reasoning.
-
Memory Representation and Retrieval: The authors discuss the importance of the memory module's structure and retrieval mechanisms, but more research is needed to determine the optimal design for different types of tasks and environments.
-
Robustness and Safety: While the system demonstrates good performance on the evaluated tasks, its ability to handle unexpected situations, errors, or safety-critical scenarios is not extensively explored in the paper.
-
Real-World Deployment: The experiments are conducted in simulation, and the authors acknowledge the need to validate the system's performance in physical robot platforms and real-world settings, where additional challenges may arise.
Overall, this research represents an important step towards developing more versatile and adaptable robot systems. However, further investigations are necessary to address the identified limitations and explore the full potential of this approach in practical applications.
Conclusion
This paper presents a novel approach that integrates a memory architecture with large language models to enable robots to perform enhanced cross-task action generation. By allowing robots to leverage their past experiences and knowledge, the proposed system demonstrates improved task completion and generalization capabilities compared to baseline methods.
The key innovation lies in the seamless integration of the memory module and language model, which enables robots to reason more effectively and make better decisions when faced with new tasks. This could have significant implications for the development of more versatile and adaptable robot systems, potentially paving the way for robots that can better assist humans in a wide range of everyday activities.
While the paper highlights several limitations and areas for future research, the promising results suggest that this approach represents an important step forward in the field of robot intelligence and autonomy.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robots Can Multitask Too: Integrating a Memory Architecture and LLMs for Enhanced Cross-Task Robot Action Generation
Hassan Ali, Philipp Allgeuer, Carlo Mazzola, Giulia Belgiovine, Burak Can Kaplan, Stefan Wermter
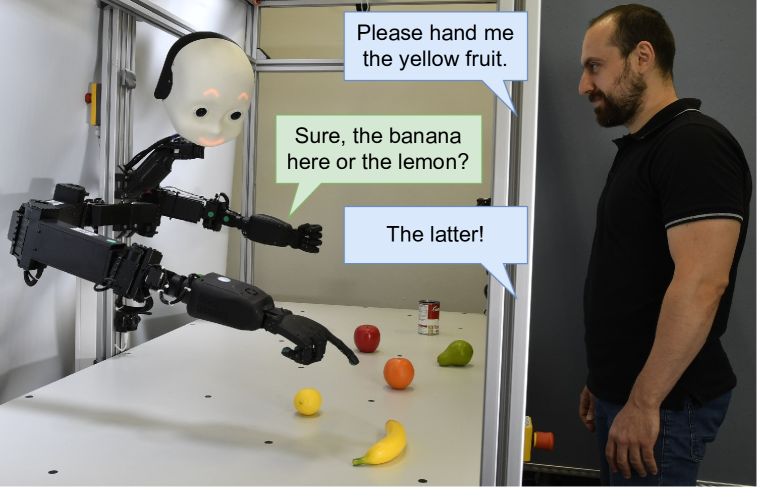
Large Language Models (LLMs) have been recently used in robot applications for grounding LLM common-sense reasoning with the robot's perception and physical abilities. In humanoid robots, memory also plays a critical role in fostering real-world embodiment and facilitating long-term interactive capabilities, especially in multi-task setups where the robot must remember previous task states, environment states, and executed actions. In this paper, we address incorporating memory processes with LLMs for generating cross-task robot actions, while the robot effectively switches between tasks. Our proposed dual-layered architecture features two LLMs, utilizing their complementary skills of reasoning and following instructions, combined with a memory model inspired by human cognition. Our results show a significant improvement in performance over a baseline of five robotic tasks, demonstrating the potential of integrating memory with LLMs for combining the robot's action and perception for adaptive task execution.
Read more7/19/2024

0
LLM-based Robot Task Planning with Exceptional Handling for General Purpose Service Robots
Ruoyu Wang, Zhipeng Yang, Zinan Zhao, Xinyan Tong, Zhi Hong, Kun Qian
The development of a general purpose service robot for daily life necessitates the robot's ability to deploy a myriad of fundamental behaviors judiciously. Recent advancements in training Large Language Models (LLMs) can be used to generate action sequences directly, given an instruction in natural language with no additional domain information. However, while the outputs of LLMs are semantically correct, the generated task plans may not accurately map to acceptable actions and might encompass various linguistic ambiguities. LLM hallucinations pose another challenge for robot task planning, which results in content that is inconsistent with real-world facts or user inputs. In this paper, we propose a task planning method based on a constrained LLM prompt scheme, which can generate an executable action sequence from a command. An exceptional handling module is further proposed to deal with LLM hallucinations problem. This module can ensure the LLM-generated results are admissible in the current environment. We evaluate our method on the commands generated by the RoboCup@Home Command Generator, observing that the robot demonstrates exceptional performance in both comprehending instructions and executing tasks.
Read more5/27/2024
💬
0
Cognitive LLMs: Towards Integrating Cognitive Architectures and Large Language Models for Manufacturing Decision-making
Siyu Wu, Alessandro Oltramari, Jonathan Francis, C. Lee Giles, Frank E. Ritter
Resolving the dichotomy between the human-like yet constrained reasoning processes of Cognitive Architectures and the broad but often noisy inference behavior of Large Language Models (LLMs) remains a challenging but exciting pursuit, for enabling reliable machine reasoning capabilities in production systems. Because Cognitive Architectures are famously developed for the purpose of modeling the internal mechanisms of human cognitive decision-making at a computational level, new investigations consider the goal of informing LLMs with the knowledge necessary for replicating such processes, e.g., guided perception, memory, goal-setting, and action. Previous approaches that use LLMs for grounded decision-making struggle with complex reasoning tasks that require slower, deliberate cognition over fast and intuitive inference -- reporting issues related to the lack of sufficient grounding, as in hallucination. To resolve these challenges, we introduce LLM-ACTR, a novel neuro-symbolic architecture that provides human-aligned and versatile decision-making by integrating the ACT-R Cognitive Architecture with LLMs. Our framework extracts and embeds knowledge of ACT-R's internal decision-making process as latent neural representations, injects this information into trainable LLM adapter layers, and fine-tunes the LLMs for downstream prediction. Our experiments on novel Design for Manufacturing tasks show both improved task performance as well as improved grounded decision-making capability of our approach, compared to LLM-only baselines that leverage chain-of-thought reasoning strategies.
Read more8/20/2024
0
When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Philipp Allgeuer, Hassan Ali, Stefan Wermter
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
Read more7/2/2024