Social Zone as a Barrier Function for Socially-Compliant Robot Navigation

0

Sign in to get full access
Overview
- This paper presents a novel approach to socially-compliant robot navigation using a "social zone" as a barrier function.
- The authors propose a method to learn the social zone around a person, which the robot should avoid to navigate in a socially acceptable manner.
- The technique is evaluated through simulations and real-world experiments, demonstrating improved performance compared to traditional navigation methods.
Plain English Explanation
When robots navigate around people, it's important that they do so in a socially acceptable way. This means respecting people's personal space and not making them feel uncomfortable. The authors of this paper have developed a new approach to achieve this.
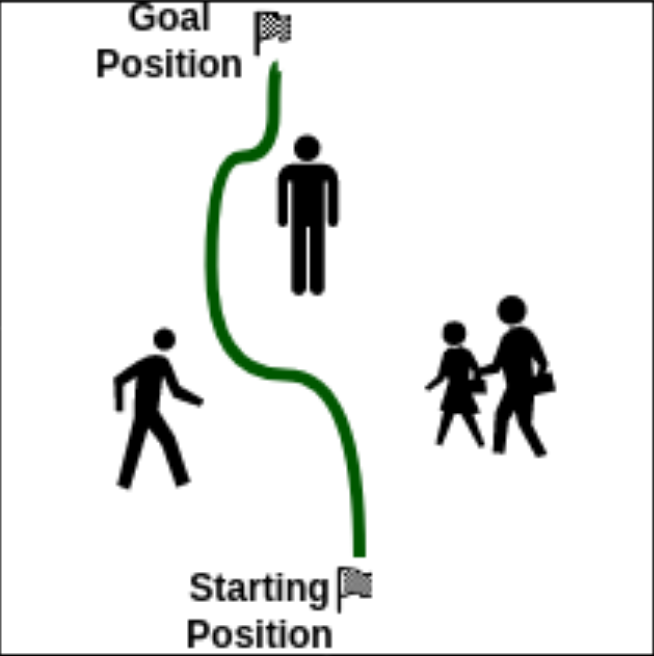
The key idea is to define a "social zone" around each person. This is an invisible boundary that the robot should avoid getting too close to. By learning the size and shape of this social zone, the robot can plan a path that keeps a respectful distance from people.
To do this, the authors use machine learning techniques to analyze data on how people behave in different situations. From this, the robot can build a model of the social zone that adapts to the context. For example, the social zone might be larger in a crowded environment compared to an empty hallway.
The paper shows through simulations and real-world tests that this social zone method leads to more natural, socially-aware robot navigation compared to traditional approaches. This is an important step towards developing robots that can seamlessly integrate into human environments and interact with people in a polite, considerate way.
Technical Explanation
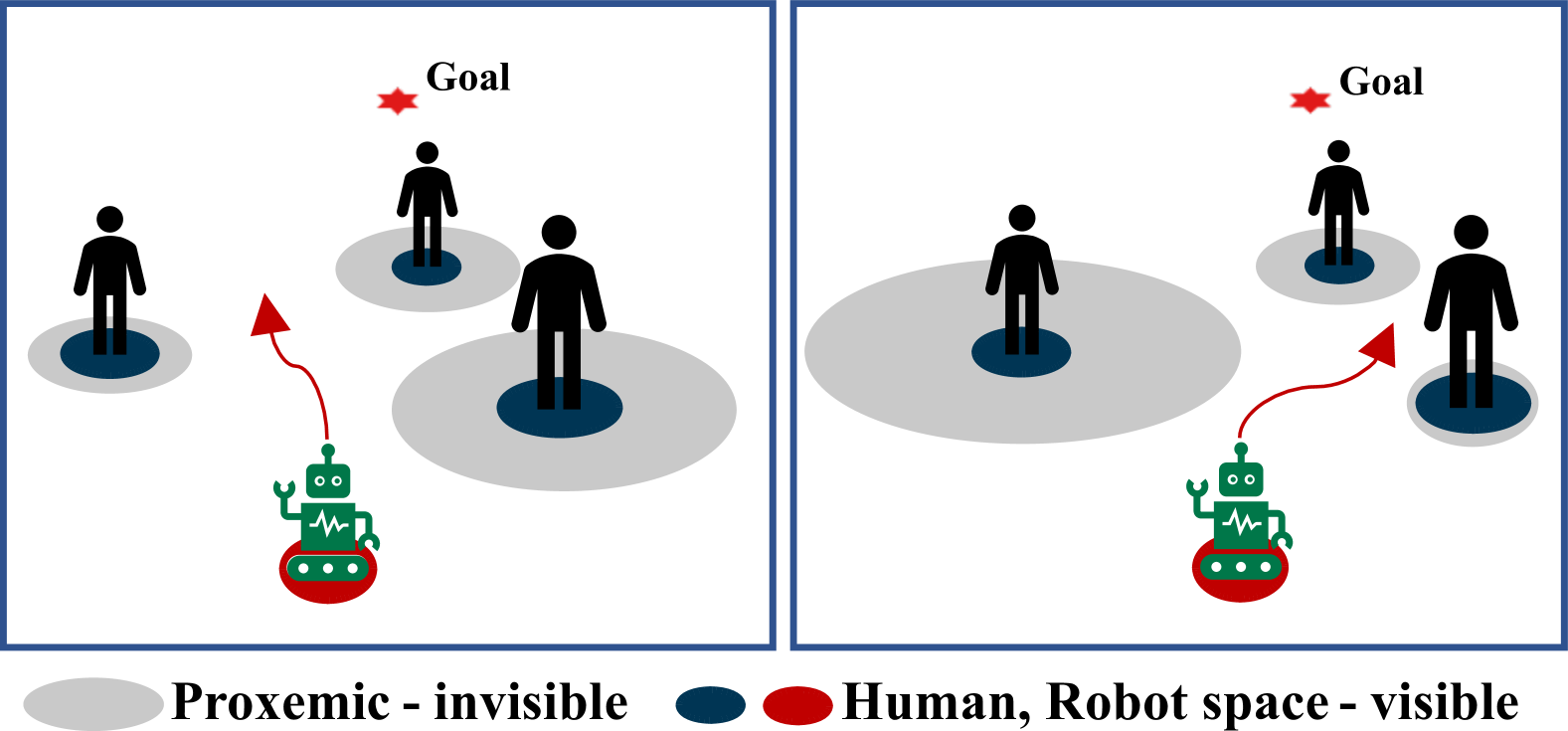
The authors propose using a "social zone" as a barrier function to enforce socially-compliant robot navigation. The social zone is defined as an invisible boundary around a person that the robot should avoid encroaching upon.
The key advantage of this approach is that the social zone can adapt to different situations. For example, the zone may be larger in crowded environments where people value their personal space more. By learning these context-specific social norms, the robot can navigate in a way that is considerate of human comfort and social conventions.
Critical Analysis
The paper presents a compelling approach to enabling socially-aware robot navigation. By modeling the social zone as a dynamic barrier, the technique can account for contextual factors that influence personal space preferences.
However, a potential limitation is that the social zone learning is based on observational data, which may not fully capture the nuances of human psychology and social norms. There could be cultural or individual differences in personal space requirements that are not adequately represented.
Further research could explore incorporating more sophisticated models of human social behavior, as well as techniques for real-time adaptation and reasoning about uncertainties in the social zone. Rigorous user studies would also help validate the approach and identify potential edge cases or unintended consequences.
Conclusion
This paper presents a novel method for socially-compliant robot navigation that models the "social zone" around people as a barrier function. By learning these context-sensitive social zones, the robot can plan paths that maintain a respectful distance from humans and navigate in a more natural, considerate manner.
The technical evaluation shows promising results, with the social zone approach outperforming traditional navigation techniques. This work represents an important step towards developing robots that can seamlessly integrate into human environments and interact with people in a socially appropriate way.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Social Zone as a Barrier Function for Socially-Compliant Robot Navigation
Junwoo Jang, Maani Ghaffari
This study addresses the challenge of integrating social norms into robot navigation, which is essential for ensuring that robots operate safely and efficiently in human-centric environments. Social norms, often unspoken and implicitly understood among people, are difficult to explicitly define and implement in robotic systems. To overcome this, we derive these norms from real human trajectory data, utilizing the comprehensive ATC dataset to identify the minimum social zones humans and robots must respect. These zones are integrated into the robot' navigation system by applying barrier functions, ensuring the robot consistently remains within the designated safety set. Simulation results demonstrate that our system effectively mimics human-like navigation strategies, such as passing on the right side and adjusting speed or pausing in constrained spaces. The proposed framework is versatile, easily comprehensible, and tunable, demonstrating the potential to advance the development of robots designed to navigate effectively in human-centric environments.
Read more5/27/2024

0
Learning Social Cost Functions for Human-Aware Path Planning
Andrea Eirale, Matteo Leonetti, Marcello Chiaberge
Achieving social acceptance is one of the main goals of Social Robotic Navigation. Despite this topic has received increasing interest in recent years, most of the research has focused on driving the robotic agent along obstacle-free trajectories, planning around estimates of future human motion to respect personal distances and optimize navigation. However, social interactions in everyday life are also dictated by norms that do not strictly depend on movement, such as when standing at the end of a queue rather than cutting it. In this paper, we propose a novel method to recognize common social scenarios and modify a traditional planner's cost function to adapt to them. This solution enables the robot to carry out different social navigation behaviors that would not arise otherwise, maintaining the robustness of traditional navigation. Our approach allows the robot to learn different social norms with a single learned model, rather than having different modules for each task. As a proof of concept, we consider the tasks of queuing and respect interaction spaces of groups of people talking to one another, but the method can be extended to other human activities that do not involve motion.
Read more7/16/2024
0
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
Read more5/3/2024
0
Socially Integrated Navigation: A Social Acting Robot with Deep Reinforcement Learning
Daniel Flogel, Lars Fischer, Thomas Rudolf, Tobias Schurmann, Soren Hohmann
Mobile robots are being used on a large scale in various crowded situations and become part of our society. The socially acceptable navigation behavior of a mobile robot with individual human consideration is an essential requirement for scalable applications and human acceptance. Deep Reinforcement Learning (DRL) approaches are recently used to learn a robot's navigation policy and to model the complex interactions between robots and humans. We propose to divide existing DRL-based navigation approaches based on the robot's exhibited social behavior and distinguish between social collision avoidance with a lack of social behavior and socially aware approaches with explicit predefined social behavior. In addition, we propose a novel socially integrated navigation approach where the robot's social behavior is adaptive and emerges from the interaction with humans. The formulation of our approach is derived from a sociological definition, which states that social acting is oriented toward the acting of others. The DRL policy is trained in an environment where other agents interact socially integrated and reward the robot's behavior individually. The simulation results indicate that the proposed socially integrated navigation approach outperforms a socially aware approach in terms of ego navigation performance while significantly reducing the negative impact on all agents within the environment.
Read more7/29/2024