Robot Navigation with Entity-Based Collision Avoidance using Deep Reinforcement Learning

0
Sign in to get full access
Overview
- This paper presents a deep reinforcement learning approach for robot navigation with entity-based collision avoidance.
- The proposed method uses a neural network to learn a policy that can navigate a robot through an environment while avoiding collisions with other entities.
- The paper describes the architecture of the neural network, the training process, and the results of experiments in simulated environments.
Plain English Explanation
The researchers developed a system that allows a robot to navigate through an environment while avoiding collisions with other objects or people. They used a deep learning approach, which means the robot learns how to navigate by repeatedly practicing in a simulated environment and adjusting its actions based on the results.
The key innovation is that the robot's decision-making is based on "entities" in the environment, rather than just the robot's position and the positions of obstacles. This allows the robot to better understand the context and relationships between different objects, which can help it make more informed decisions about how to avoid collisions.
For example, the robot might recognize that a person is walking and adjust its path accordingly, rather than just seeing the person as a static obstacle. This "social awareness" can help the robot navigate in a more natural and human-like way.
The researchers tested their approach in computer simulations and found that it outperformed other navigation algorithms in terms of the robot's ability to reach its goal while avoiding collisions. This suggests that the entity-based approach could be a promising way to enable robots to navigate safely and effectively in complex, dynamic environments.
Technical Explanation
The paper presents a deep reinforcement learning (RL) approach for robot navigation with entity-based collision avoidance. The key idea is to use a neural network to learn a policy that can navigate a robot through an environment while avoiding collisions with other entities, such as people, obstacles, or other robots.
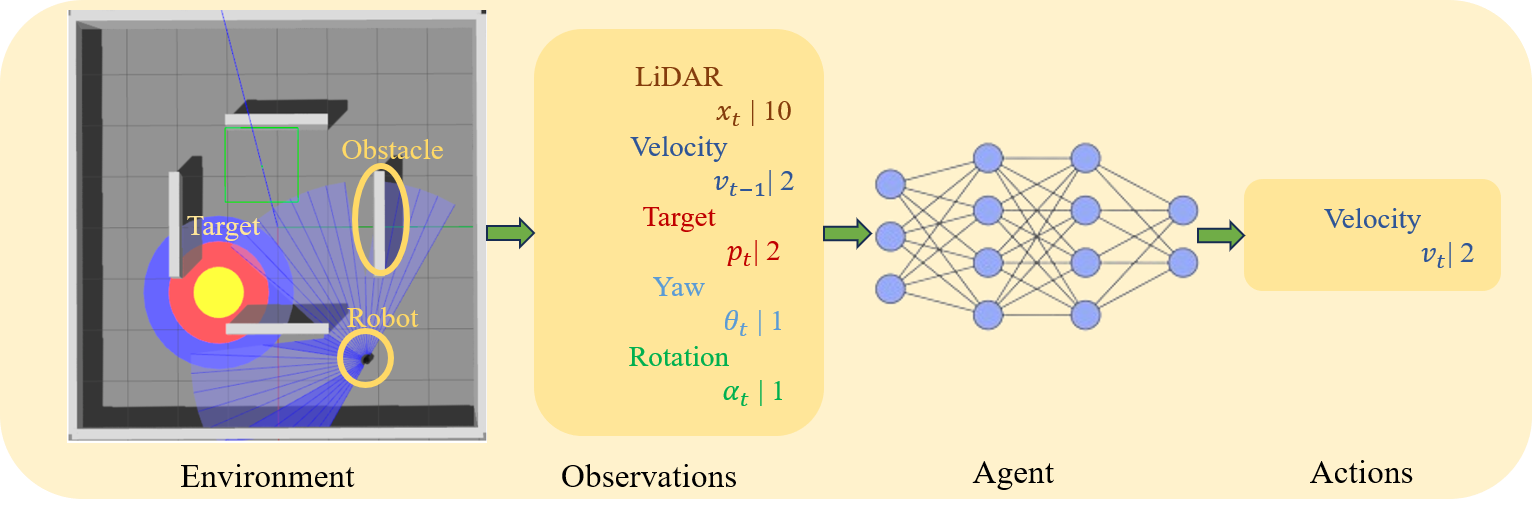
The neural network architecture takes as input the robot's current state, which includes its position, orientation, and the positions of nearby entities. It outputs the robot's desired action, which could be a change in speed or direction. The network is trained using a reinforcement learning algorithm, where the robot receives rewards for reaching its goal and penalties for collisions.
The researchers conducted experiments in simulated environments to evaluate the performance of their approach. They compared it to other navigation algorithms and found that their entity-based method outperformed the others in terms of the robot's ability to reach its goal while avoiding collisions.
Critical Analysis
The paper provides a detailed description of the proposed approach and the experimental results, which is a strength. However, the authors do not discuss any potential limitations or caveats of their method. For example, it's unclear how well the approach would scale to larger, more complex environments, or how it would perform in real-world scenarios with noisy sensor data.
Additionally, the authors do not address potential ethical concerns related to the use of autonomous robots in public spaces, such as issues of privacy, liability, and the impact on human-robot interactions. These are important considerations that should be discussed in research on robotics and navigation.
Conclusion
The paper presents a promising approach for robot navigation with entity-based collision avoidance using deep reinforcement learning. The experimental results suggest that this method can outperform other navigation algorithms in terms of the robot's ability to reach its goal while avoiding collisions.
However, the paper lacks a discussion of the limitations and potential issues with the proposed approach, which is an area for future research. Overall, the work contributes to the ongoing effort to develop safe and effective autonomous navigation systems for robots operating in complex, dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robot Navigation with Entity-Based Collision Avoidance using Deep Reinforcement Learning
Yury Kolomeytsev, Dmitry Golembiovsky
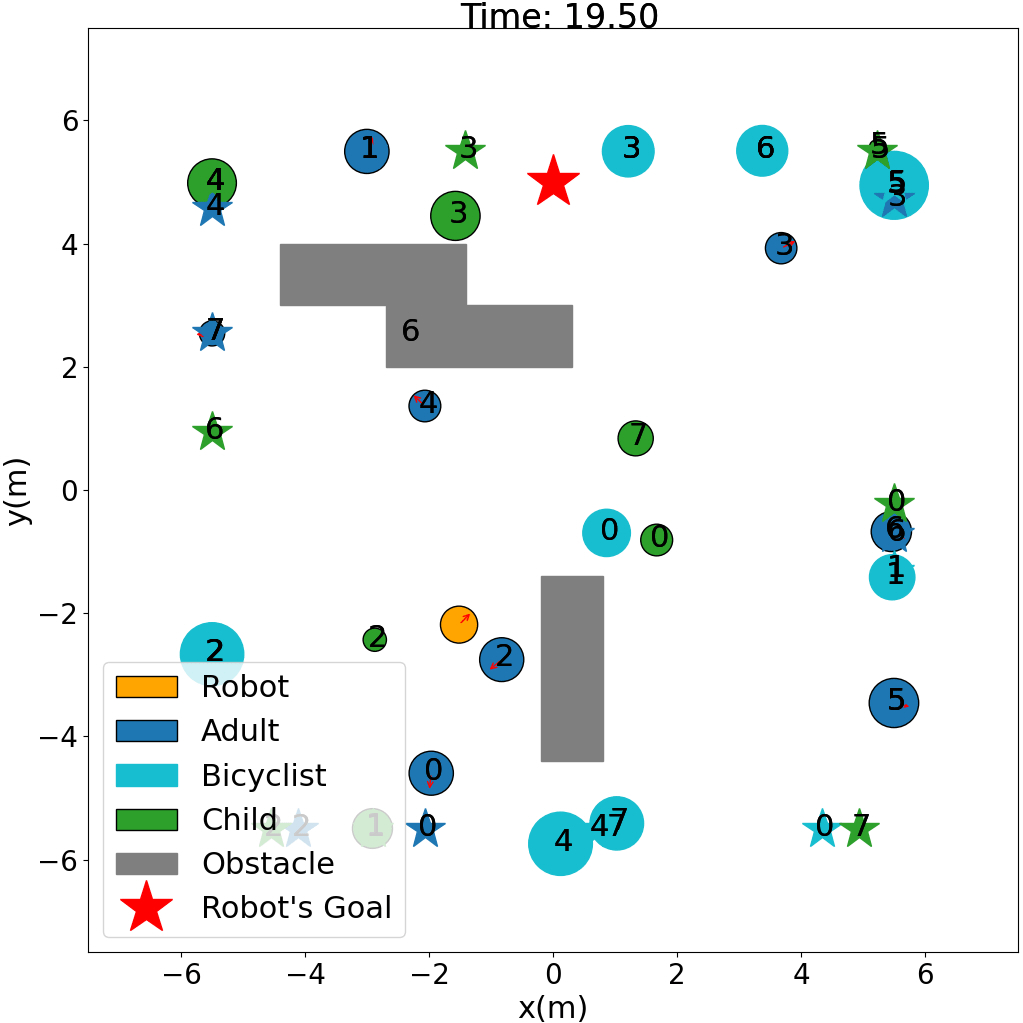
Efficient navigation in dynamic environments is crucial for autonomous robots interacting with various environmental entities, including both moving agents and static obstacles. In this study, we present a novel methodology that enhances the robot's interaction with different types of agents and obstacles based on specific safety requirements. This approach uses information about the entity types, improving collision avoidance and ensuring safer navigation. We introduce a new reward function that penalizes the robot for collisions with different entities such as adults, bicyclists, children, and static obstacles, and additionally encourages the robot's proximity to the goal. It also penalizes the robot for being close to entities, and the safe distance also depends on the entity type. Additionally, we propose an optimized algorithm for training and testing, which significantly accelerates train, validation, and test steps and enables training in complex environments. Comprehensive experiments conducted using simulation demonstrate that our approach consistently outperforms conventional navigation and collision avoidance methods, including state-of-the-art techniques. To sum up, this work contributes to enhancing the safety and efficiency of navigation systems for autonomous robots in dynamic, crowded environments.
Read more8/27/2024
0
Deep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Hamid Taheri, Seyed Rasoul Hosseini, Mohammad Ali Nekoui
Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.
Read more8/9/2024
0
Efficient Multi-agent Navigation with Lightweight DRL Policy
Xingrong Diao, Jiankun Wang
In this article, we present an end-to-end collision avoidance policy based on deep reinforcement learning (DRL) for multi-agent systems, demonstrating encouraging outcomes in real-world applications. In particular, our policy calculates the control commands of the agent based on the raw LiDAR observation. In addition, the number of parameters of the proposed basic model is 140,000, and the size of the parameter file is 3.5 MB, which allows the robot to calculate the actions from the CPU alone. We propose a multi-agent training platform based on a physics-based simulator to further bridge the gap between simulation and the real world. The policy is trained on a policy-gradients-based RL algorithm in a dense and messy training environment. A novel reward function is introduced to address the issue of agents choosing suboptimal actions in some common scenarios. Although the data used for training is exclusively from the simulation platform, the policy can be successfully transferred and deployed in real-world robots. Finally, our policy effectively responds to intentional obstructions and avoids collisions. The website is available at url{https://sites.google.com/view/xingrong2024efficient/%E9%A6%96%E9%A1%B5}.
Read more9/5/2024
🏅
0
Research on Autonomous Robots Navigation based on Reinforcement Learning
Zixiang Wang, Hao Yan, Yining Wang, Zhengjia Xu, Zhuoyue Wang, Zhizhong Wu
Reinforcement learning continuously optimizes decision-making based on real-time feedback reward signals through continuous interaction with the environment, demonstrating strong adaptive and self-learning capabilities. In recent years, it has become one of the key methods to achieve autonomous navigation of robots. In this work, an autonomous robot navigation method based on reinforcement learning is introduced. We use the Deep Q Network (DQN) and Proximal Policy Optimization (PPO) models to optimize the path planning and decision-making process through the continuous interaction between the robot and the environment, and the reward signals with real-time feedback. By combining the Q-value function with the deep neural network, deep Q network can handle high-dimensional state space, so as to realize path planning in complex environments. Proximal policy optimization is a strategy gradient-based method, which enables robots to explore and utilize environmental information more efficiently by optimizing policy functions. These methods not only improve the robot's navigation ability in the unknown environment, but also enhance its adaptive and self-learning capabilities. Through multiple training and simulation experiments, we have verified the effectiveness and robustness of these models in various complex scenarios.
Read more8/15/2024