Towards Collaborative Intelligence: Propagating Intentions and Reasoning for Multi-Agent Coordination with Large Language Models

0

Sign in to get full access
Overview
- This research paper explores the challenges of coordinating multi-agent systems using large language models (LLMs).
- The authors propose a novel approach called "Propagating Intentions and Reasoning" (PIR) to enable collaborative intelligence among LLM-based agents.
- The paper evaluates the PIR method across various multi-agent coordination tasks, including those described in related papers, theory of mind, and visual reasoning.
Plain English Explanation
The paper focuses on the challenge of getting multiple AI agents to work together effectively. Imagine a team of robots or virtual assistants that need to coordinate their actions to achieve a common goal, like cleaning a room or planning a trip. This can be really hard to do, especially when the agents are using powerful language models that can understand and generate human-like text.
The key idea behind the "Propagating Intentions and Reasoning" (PIR) approach is to help these AI agents better understand each other's goals and thought processes. By sharing their intentions and reasoning with one another, the agents can develop a shared understanding and work together more smoothly.
For example, if one agent knows that another agent is trying to tidy up the room, it can adjust its own actions to avoid getting in the way or to assist the other agent. Or if the agents are planning a trip, they can share their reasoning about the best route or activities, rather than just making decisions independently.
The paper evaluates this PIR approach across a variety of multi-agent coordination tasks, including those described in related papers, theory of mind, and visual reasoning. The goal is to show that this approach can help AI agents work together more effectively, which could have important applications in areas like robotics, smart homes, and autonomous vehicles.
Technical Explanation
The paper proposes a novel approach called "Propagating Intentions and Reasoning" (PIR) to enable collaborative intelligence among LLM-based agents. The key idea is to allow agents to share their intentions, goals, and underlying reasoning with each other, so that they can develop a shared understanding and coordinate their actions more effectively.
The PIR system works by having each agent maintain an internal model of its own intentions and reasoning, as well as models of the other agents' intentions and reasoning. These models are continuously updated and shared with the other agents, allowing them to build a collective understanding of the overall task and each other's roles.
The paper evaluates the PIR approach across a range of multi-agent coordination tasks, including those described in related papers, theory of mind, and visual reasoning. The experiments show that the PIR approach outperforms baseline methods in terms of coordination efficiency, task completion, and shared understanding among the agents.
Critical Analysis
The paper presents a promising approach for enabling effective collaboration among LLM-based agents, but it also acknowledges several limitations and areas for further research.
One key limitation is the reliance on the agents' ability to accurately model each other's intentions and reasoning. In complex, dynamic environments, this can be challenging, as agents may not always have perfect information about each other's internal states. The paper suggests exploring ways to handle uncertainty and partial observability in the intention and reasoning models.
Additionally, the paper focuses primarily on simulated environments and tasks, and it would be valuable to see the PIR approach evaluated in more realistic, embodied settings, such as those described in related papers or embodied LLM agents learning to cooperate. This could help uncover additional challenges and insights for deploying collaborative LLM-based systems in the real world.
Overall, the paper makes a significant contribution to the field of multi-agent coordination and collaboration, and the PIR approach represents an important step towards enabling more effective and intelligent cooperation among AI systems. However, continued research and experimentation will be necessary to fully realize the potential of this approach.
Conclusion
This research paper presents a novel approach called "Propagating Intentions and Reasoning" (PIR) to enable collaborative intelligence among LLM-based agents. The key idea is to allow agents to share their intentions, goals, and underlying reasoning with each other, so that they can develop a shared understanding and coordinate their actions more effectively.
The paper evaluates the PIR approach across a range of multi-agent coordination tasks, demonstrating its advantages over baseline methods. While the paper acknowledges several limitations and areas for further research, the PIR approach represents an important step towards enabling more effective and intelligent cooperation among AI systems, with potential applications in robotics, smart homes, autonomous vehicles, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Collaborative Intelligence: Propagating Intentions and Reasoning for Multi-Agent Coordination with Large Language Models
Xihe Qiu, Haoyu Wang, Xiaoyu Tan, Chao Qu, Yujie Xiong, Yuan Cheng, Yinghui Xu, Wei Chu, Yuan Qi
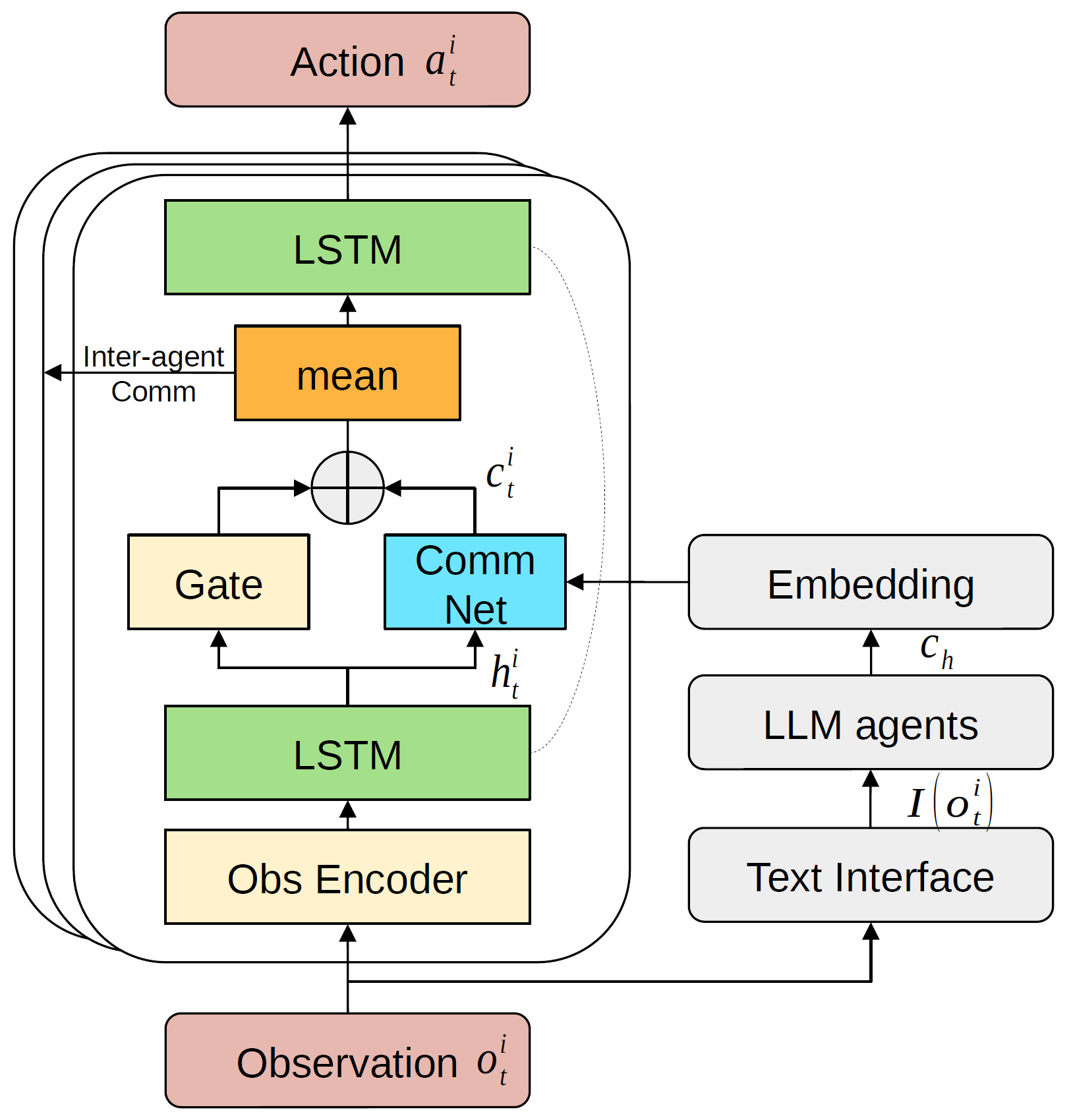
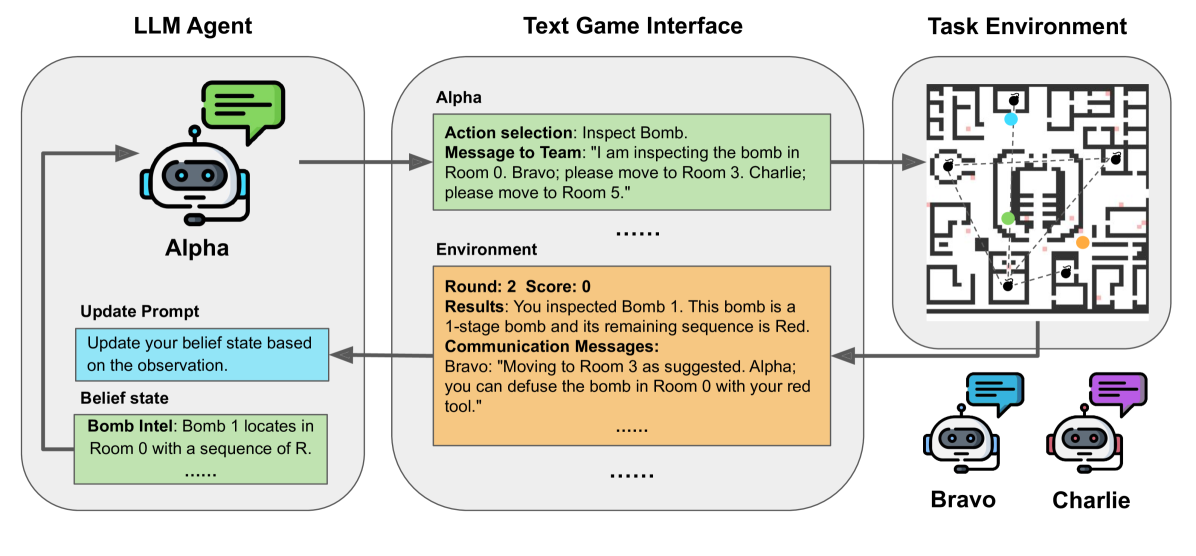
Effective collaboration in multi-agent systems requires communicating goals and intentions between agents. Current agent frameworks often suffer from dependencies on single-agent execution and lack robust inter-module communication, frequently leading to suboptimal multi-agent reinforcement learning (MARL) policies and inadequate task coordination. To address these challenges, we present a framework for training large language models (LLMs) as collaborative agents to enable coordinated behaviors in cooperative MARL. Each agent maintains a private intention consisting of its current goal and associated sub-tasks. Agents broadcast their intentions periodically, allowing other agents to infer coordination tasks. A propagation network transforms broadcast intentions into teammate-specific communication messages, sharing relevant goals with designated teammates. The architecture of our framework is structured into planning, grounding, and execution modules. During execution, multiple agents interact in a downstream environment and communicate intentions to enable coordinated behaviors. The grounding module dynamically adapts comprehension strategies based on emerging coordination patterns, while feedback from execution agents influnces the planning module, enabling the dynamic re-planning of sub-tasks. Results in collaborative environment simulation demonstrate intention propagation reduces miscoordination errors by aligning sub-task dependencies between agents. Agents learn when to communicate intentions and which teammates require task details, resulting in emergent coordinated behaviors. This demonstrates the efficacy of intention sharing for cooperative multi-agent RL based on LLMs.
Read more7/18/2024
0
Language Grounded Multi-agent Communication for Ad-hoc Teamwork
Huao Li, Hossein Nourkhiz Mahjoub, Behdad Chalaki, Vaishnav Tadiparthi, Kwonjoon Lee, Ehsan Moradi-Pari, Charles Michael Lewis, Katia P Sycara
Multi-Agent Reinforcement Learning (MARL) methods have shown promise in enabling agents to learn a shared communication protocol from scratch and accomplish challenging team tasks. However, the learned language is usually not interpretable to humans or other agents not co-trained together, limiting its applicability in ad-hoc teamwork scenarios. In this work, we propose a novel computational pipeline that aligns the communication space between MARL agents with an embedding space of human natural language by grounding agent communications on synthetic data generated by embodied Large Language Models (LLMs) in interactive teamwork scenarios. Our results demonstrate that introducing language grounding not only maintains task performance but also accelerates the emergence of communication. Furthermore, the learned communication protocols exhibit zero-shot generalization capabilities in ad-hoc teamwork scenarios with unseen teammates and novel task states. This work presents a significant step toward enabling effective communication and collaboration between artificial agents and humans in real-world teamwork settings.
Read more9/27/2024
0
LLM-Coordination: Evaluating and Analyzing Multi-agent Coordination Abilities in Large Language Models
Saaket Agashe, Yue Fan, Anthony Reyna, Xin Eric Wang
The emergent reasoning and Theory of Mind (ToM) abilities demonstrated by Large Language Models (LLMs) make them promising candidates for developing coordination agents. In this study, we introduce a new LLM-Coordination Benchmark aimed at a detailed analysis of LLMs within the context of Pure Coordination Games, where participating agents need to cooperate for the most gain. This benchmark evaluates LLMs through two distinct tasks: (1) emph{Agentic Coordination}, where LLMs act as proactive participants for cooperation in 4 pure coordination games; (2) emph{Coordination Question Answering (QA)}, where LLMs are prompted to answer 198 multiple-choice questions from the 4 games for evaluation of three key reasoning abilities: Environment Comprehension, ToM Reasoning, and Joint Planning. Furthermore, to enable LLMs for multi-agent coordination, we introduce a Cognitive Architecture for Coordination (CAC) framework that can easily integrate different LLMs as plug-and-play modules for pure coordination games. Our findings indicate that LLM agents equipped with GPT-4-turbo achieve comparable performance to state-of-the-art reinforcement learning methods in games that require commonsense actions based on the environment. Besides, zero-shot coordination experiments reveal that, unlike RL methods, LLM agents are robust to new unseen partners. However, results on Coordination QA show a large room for improvement in the Theory of Mind reasoning and joint planning abilities of LLMs. The analysis also sheds light on how the ability of LLMs to understand their environment and their partner's beliefs and intentions plays a part in their ability to plan for coordination. Our code is available at url{https://github.com/eric-ai-lab/llm_coordination}.
Read more4/4/2024
0
Theory of Mind for Multi-Agent Collaboration via Large Language Models
Huao Li, Yu Quan Chong, Simon Stepputtis, Joseph Campbell, Dana Hughes, Michael Lewis, Katia Sycara
While Large Language Models (LLMs) have demonstrated impressive accomplishments in both reasoning and planning, their abilities in multi-agent collaborations remains largely unexplored. This study evaluates LLM-based agents in a multi-agent cooperative text game with Theory of Mind (ToM) inference tasks, comparing their performance with Multi-Agent Reinforcement Learning (MARL) and planning-based baselines. We observed evidence of emergent collaborative behaviors and high-order Theory of Mind capabilities among LLM-based agents. Our results reveal limitations in LLM-based agents' planning optimization due to systematic failures in managing long-horizon contexts and hallucination about the task state. We explore the use of explicit belief state representations to mitigate these issues, finding that it enhances task performance and the accuracy of ToM inferences for LLM-based agents.
Read more6/28/2024