VAL: Interactive Task Learning with GPT Dialog Parsing

0

Sign in to get full access
Overview
- This paper introduces VAL, a system that allows users to teach robots new tasks through natural language dialogues.
- VAL uses a large language model (LLM) to parse the user's instructions and convert them into a hierarchical task network that the robot can execute.
- The key innovation is VAL's ability to handle ambiguous or incomplete instructions by engaging the user in clarifying dialogues.
Plain English Explanation
VAL is a system that lets people teach robots new tasks by talking to them. Instead of having to program the robot with step-by-step instructions, you can just have a conversation with VAL and explain what you want the robot to do.
VAL uses a powerful AI language model to understand your instructions, even if they're a bit vague or incomplete. It can then ask you clarifying questions to fill in the gaps, and translate your description into a detailed plan that the robot can follow.
This is a big advance over traditional programming methods, which require you to spell out every little step. With VAL, you can teach a robot new skills just by having a natural discussion, like explaining a task to another person. This makes it much easier for non-technical users to customize and expand what their robots can do.
Technical Explanation
The core of VAL is a large language model (LLM) that can parse and understand natural language instructions from the user. When the user describes a new task, VAL converts this input into a hierarchical task network - a structured representation of the subtasks and relationships involved.
To handle ambiguity or missing information in the user's instructions, VAL engages in a clarifying dialogue. It can ask targeted questions to fill in the gaps and refine the task representation. This interactive process continues until VAL has enough detail to generate a full execution plan for the robot.
VAL builds on prior work in hierarchical task networks and language-based robot control. However, its key innovation is the use of a powerful LLM to handle the natural language processing, rather than relying on more constrained language understanding systems.
The authors evaluate VAL on a set of household tasks, showing that it can effectively learn new skills from conversational instructions. They also compare its performance to prior dialogue-based approaches, demonstrating improved task completion and user satisfaction.
Critical Analysis
The VAL system represents an exciting step forward in making robots more accessible and customizable for non-expert users. By leveraging large language models, it can handle the ambiguity and complexity of natural language in a way that was not possible with more rigid language understanding approaches.
However, the paper does note some limitations of the current system. For example, VAL may struggle with tasks that require long-term reasoning or substantial background knowledge beyond what is contained in the training data for the LLM. There are also open questions about the robustness of the system to noisy or adversarial inputs.
Additionally, while the interactive clarification dialogues are a key strength, they could also become frustrating for users if not designed carefully. The system will need to strike the right balance between eliciting the necessary information and maintaining an efficient, natural conversation flow.
Further research is also needed to explore the generalization capabilities of the VAL approach. The current evaluation is limited to a specific set of household tasks - it remains to be seen how well the system would perform on a wider range of domains and contexts. There may also be opportunities to combine VAL with other techniques for improving the robustness and generalization of LLMs.
Overall, VAL represents an important step forward in making robots more accessible and customizable through natural language interaction. With continued research and development, systems like VAL could significantly expand the potential applications and user base for robotic technologies.
Conclusion
The VAL system introduces a novel approach to teaching robots new tasks through natural language dialogues. By leveraging a powerful large language model, VAL can understand and execute instructions from users, even when they are ambiguous or incomplete.
This interactive, conversational approach to robot programming has the potential to make robotics much more accessible to non-experts, enabling a wider range of people to customize and expand the capabilities of their robotic assistants. While the current system has some limitations, the core ideas behind VAL represent an exciting step forward in the field of human-robot interaction.
With further research and development, systems like VAL could significantly broaden the reach and impact of robotics, allowing these technologies to be tailored to the specific needs and preferences of individual users and contexts.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
VAL: Interactive Task Learning with GPT Dialog Parsing
Lane Lawley, Christopher J. MacLellan
Machine learning often requires millions of examples to produce static, black-box models. In contrast, interactive task learning (ITL) emphasizes incremental knowledge acquisition from limited instruction provided by humans in modalities such as natural language. However, ITL systems often suffer from brittle, error-prone language parsing, which limits their usability. Large language models (LLMs) are resistant to brittleness but are not interpretable and cannot learn incrementally. We present VAL, an ITL system with a new philosophy for LLM/symbolic integration. By using LLMs only for specific tasks--such as predicate and argument selection--within an algorithmic framework, VAL reaps the benefits of LLMs to support interactive learning of hierarchical task knowledge from natural language. Acquired knowledge is human interpretable and generalizes to support execution of novel tasks without additional training. We studied users' interactions with VAL in a video game setting, finding that most users could successfully teach VAL using language they felt was natural.
Read more4/24/2024

0
ICAL: Continual Learning of Multimodal Agents by Transforming Trajectories into Actionable Insights
Gabriel Sarch, Lawrence Jang, Michael J. Tarr, William W. Cohen, Kenneth Marino, Katerina Fragkiadaki
Large-scale generative language and vision-language models (LLMs and VLMs) excel in few-shot in-context learning for decision making and instruction following. However, they require high-quality exemplar demonstrations to be included in their context window. In this work, we ask: Can LLMs and VLMs generate their own prompt examples from generic, sub-optimal demonstrations? We propose In-Context Abstraction Learning (ICAL), a method that builds a memory of multimodal experience insights from sub-optimal demonstrations and human feedback. Given a noisy demonstration in a new domain, VLMs abstract the trajectory into a general program by fixing inefficient actions and annotating cognitive abstractions: task relationships, object state changes, temporal subgoals, and task construals. These abstractions are refined and adapted interactively through human feedback while the agent attempts to execute the trajectory in a similar environment. The resulting abstractions, when used as exemplars in the prompt, significantly improve decision-making in retrieval-augmented LLM and VLM agents. Our ICAL agent surpasses the state-of-the-art in dialogue-based instruction following in TEACh, multimodal web agents in VisualWebArena, and action anticipation in Ego4D. In TEACh, we achieve a 12.6% improvement in goal-condition success. In VisualWebArena, our task success rate improves over the SOTA from 14.3% to 22.7%. In Ego4D action forecasting, we improve over few-shot GPT-4V and remain competitive with supervised models. We show finetuning our retrieval-augmented in-context agent yields additional improvements. Our approach significantly reduces reliance on expert-crafted examples and consistently outperforms in-context learning from action plans that lack such insights.
Read more6/24/2024
0
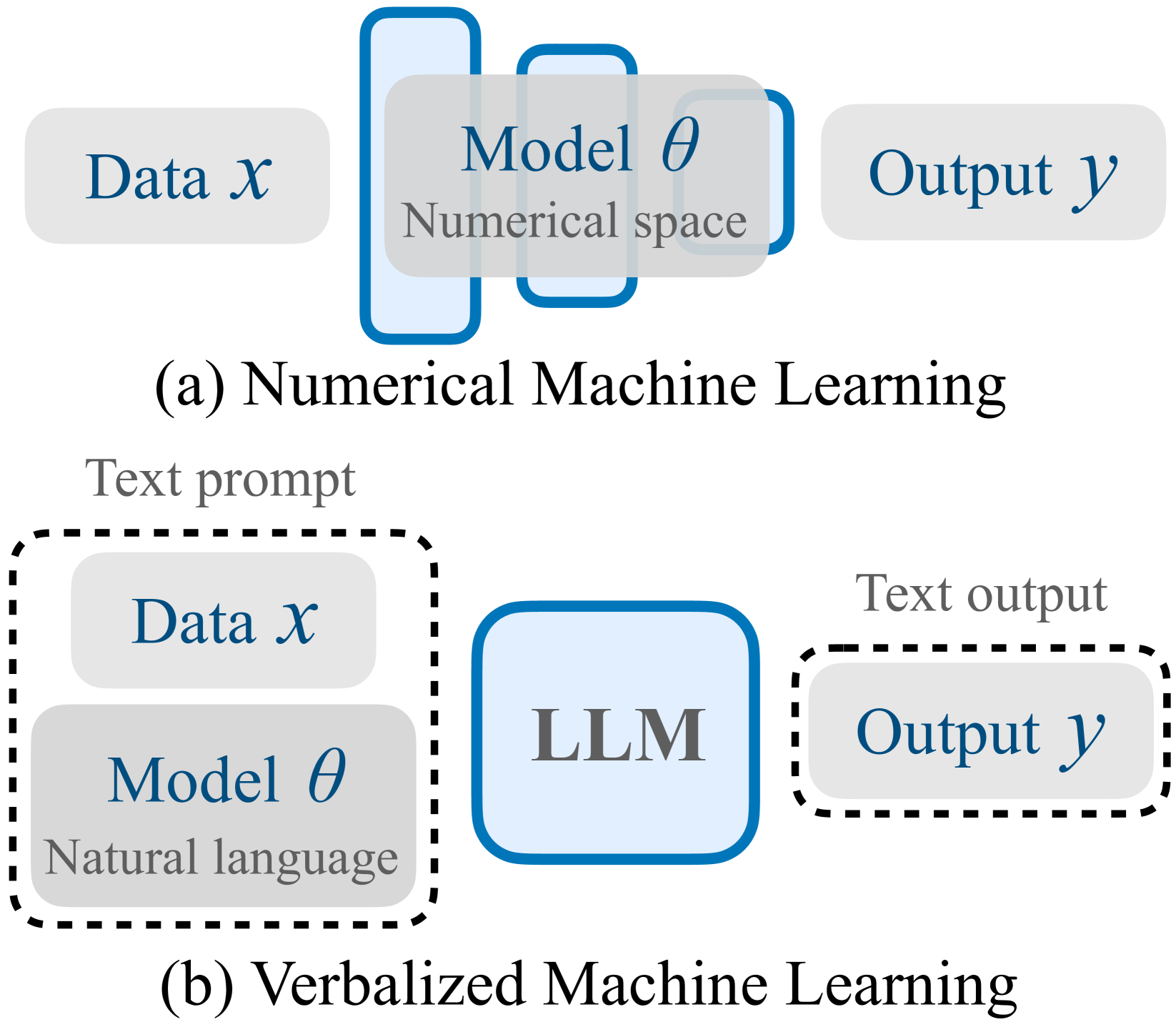
Verbalized Machine Learning: Revisiting Machine Learning with Language Models
Tim Z. Xiao, Robert Bamler, Bernhard Scholkopf, Weiyang Liu
Motivated by the large progress made by large language models (LLMs), we introduce the framework of verbalized machine learning (VML). In contrast to conventional machine learning models that are typically optimized over a continuous parameter space, VML constrains the parameter space to be human-interpretable natural language. Such a constraint leads to a new perspective of function approximation, where an LLM with a text prompt can be viewed as a function parameterized by the text prompt. Guided by this perspective, we revisit classical machine learning problems, such as regression and classification, and find that these problems can be solved by an LLM-parameterized learner and optimizer. The major advantages of VML include (1) easy encoding of inductive bias: prior knowledge about the problem and hypothesis class can be encoded in natural language and fed into the LLM-parameterized learner; (2) automatic model class selection: the optimizer can automatically select a concrete model class based on data and verbalized prior knowledge, and it can update the model class during training; and (3) interpretable learner updates: the LLM-parameterized optimizer can provide explanations for why each learner update is performed. We conduct several studies to empirically evaluate the effectiveness of VML, and hope that VML can serve as a stepping stone to stronger interpretability and trustworthiness in ML.
Read more6/7/2024

0
Using Advanced LLMs to Enhance Smaller LLMs: An Interpretable Knowledge Distillation Approach
Tong Wang, K. Sudhir, Dat Hong
Advanced Large language models (LLMs) like GPT-4 or LlaMa 3 provide superior performance in complex human-like interactions. But they are costly, or too large for edge devices such as smartphones and harder to self-host, leading to security and privacy concerns. This paper introduces a novel interpretable knowledge distillation approach to enhance the performance of smaller, more economical LLMs that firms can self-host. We study this problem in the context of building a customer service agent aimed at achieving high customer satisfaction through goal-oriented dialogues. Unlike traditional knowledge distillation, where the student model learns directly from the teacher model's responses via fine-tuning, our interpretable strategy teaching approach involves the teacher providing strategies to improve the student's performance in various scenarios. This method alternates between a scenario generation step and a strategies for improvement step, creating a customized library of scenarios and optimized strategies for automated prompting. The method requires only black-box access to both student and teacher models; hence it can be used without manipulating model parameters. In our customer service application, the method improves performance, and the learned strategies are transferable to other LLMs and scenarios beyond the training set. The method's interpretabilty helps safeguard against potential harms through human audit.
Read more8/15/2024