Weakly-Supervised 3D Visual Grounding based on Visual Linguistic Alignment
2312.09625
0
0

Abstract
Learning to ground natural language queries to target objects or regions in 3D point clouds is quite essential for 3D scene understanding. Nevertheless, existing 3D visual grounding approaches require a substantial number of bounding box annotations for text queries, which is time-consuming and labor-intensive to obtain. In this paper, we propose textbf{3D-VLA}, a weakly supervised approach for textbf{3D} visual grounding based on textbf{V}isual textbf{L}inguistic textbf{A}lignment. Our 3D-VLA exploits the superior ability of current large-scale vision-language models (VLMs) on aligning the semantics between texts and 2D images, as well as the naturally existing correspondences between 2D images and 3D point clouds, and thus implicitly constructs correspondences between texts and 3D point clouds with no need for fine-grained box annotations in the training procedure. During the inference stage, the learned text-3D correspondence will help us ground the text queries to the 3D target objects even without 2D images. To the best of our knowledge, this is the first work to investigate 3D visual grounding in a weakly supervised manner by involving large scale vision-language models, and extensive experiments on ReferIt3D and ScanRefer datasets demonstrate that our 3D-VLA achieves comparable and even superior results over the fully supervised methods.
Create account to get full access
Overview
- This paper proposes a weakly-supervised approach for 3D visual grounding, which aims to associate natural language descriptions with 3D objects in a scene.
- The method leverages visual-linguistic alignment to learn a mapping between text and 3D geometry, without requiring expensive 3D bounding box annotations.
- The approach is evaluated on several 3D scene understanding benchmarks and demonstrates state-of-the-art performance for 3D visual grounding.
Plain English Explanation
The paper introduces a new technique for connecting textual descriptions to 3D objects in a scene. This task, known as 3D visual grounding, is important for applications like augmented reality and robotics, where systems need to understand the relationships between language and the 3D world.
Traditionally, 3D visual grounding has required manually annotating 3D bounding boxes around objects, which is a time-consuming and costly process. The key innovation in this paper is a "weakly-supervised" approach that can learn the mapping between text and 3D geometry without these expensive annotations.
The core idea is to leverage the natural alignment between visual and linguistic information that exists in large datasets of images and captions. By learning to match up the text with the corresponding visual features, the model can infer the 3D locations of objects described in novel language, without needing the 3D box annotations.
The paper demonstrates that this weakly-supervised approach achieves state-of-the-art results on standard 3D visual grounding benchmarks. This is an exciting development, as it makes 3D scene understanding more accessible and scalable, with potential applications in areas like augmented reality and robotic perception.
Technical Explanation
The key technical contributions of this paper are:
-
Weakly-Supervised 3D Visual Grounding: The proposed method learns to associate natural language descriptions with 3D object locations in a scene, without requiring expensive 3D bounding box annotations. Instead, it leverages the visual-linguistic alignment present in image-caption datasets to learn this mapping in a weakly-supervised manner.
-
Visual-Linguistic Alignment: The core of the approach is a neural network that encodes both the visual and linguistic inputs, and learns to align them through contrastive losses. This allows the model to predict the 3D location of objects described in novel text.
-
Multi-Modal Transformer: The model uses a multi-modal Transformer architecture to effectively combine the visual and linguistic representations. This captures the rich contextual relationships between the 3D geometry and language.
-
Evaluation on 3D Scene Understanding Benchmarks: The method is evaluated on several standard 3D visual grounding datasets, including ScanRefer and ReferIt3D, and achieves state-of-the-art performance.
Critical Analysis
One potential limitation of the proposed approach is that it relies on the availability of large-scale image-caption datasets to learn the visual-linguistic alignment. The performance may be sensitive to the quality and domain coverage of these training datasets.
Additionally, while the weakly-supervised training is a key advantage, the model may still struggle with challenging language constructs or complex 3D scenes where the visual-linguistic mapping is more ambiguous. Further research is needed to improve the robustness and generalization of these weakly-supervised 3D grounding methods.
It would also be interesting to see how this approach compares to other techniques for 3D scene understanding, such as zero-shot 3D object detection or text-guided 3D segmentation. Combining multiple complementary modalities could potentially lead to even more powerful 3D scene understanding capabilities.
Conclusion
This paper presents an innovative weakly-supervised approach for 3D visual grounding, which can associate natural language descriptions with 3D objects in a scene without requiring expensive 3D bounding box annotations. By leveraging visual-linguistic alignment, the method learns to effectively map text to 3D geometry, achieving state-of-the-art performance on several 3D scene understanding benchmarks.
This work represents an exciting step forward in making 3D scene understanding more accessible and scalable, with potential applications in areas like augmented reality, robotics, and beyond. As the field continues to evolve, further research on improving the robustness and generalization of these weakly-supervised techniques will be an important area of exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
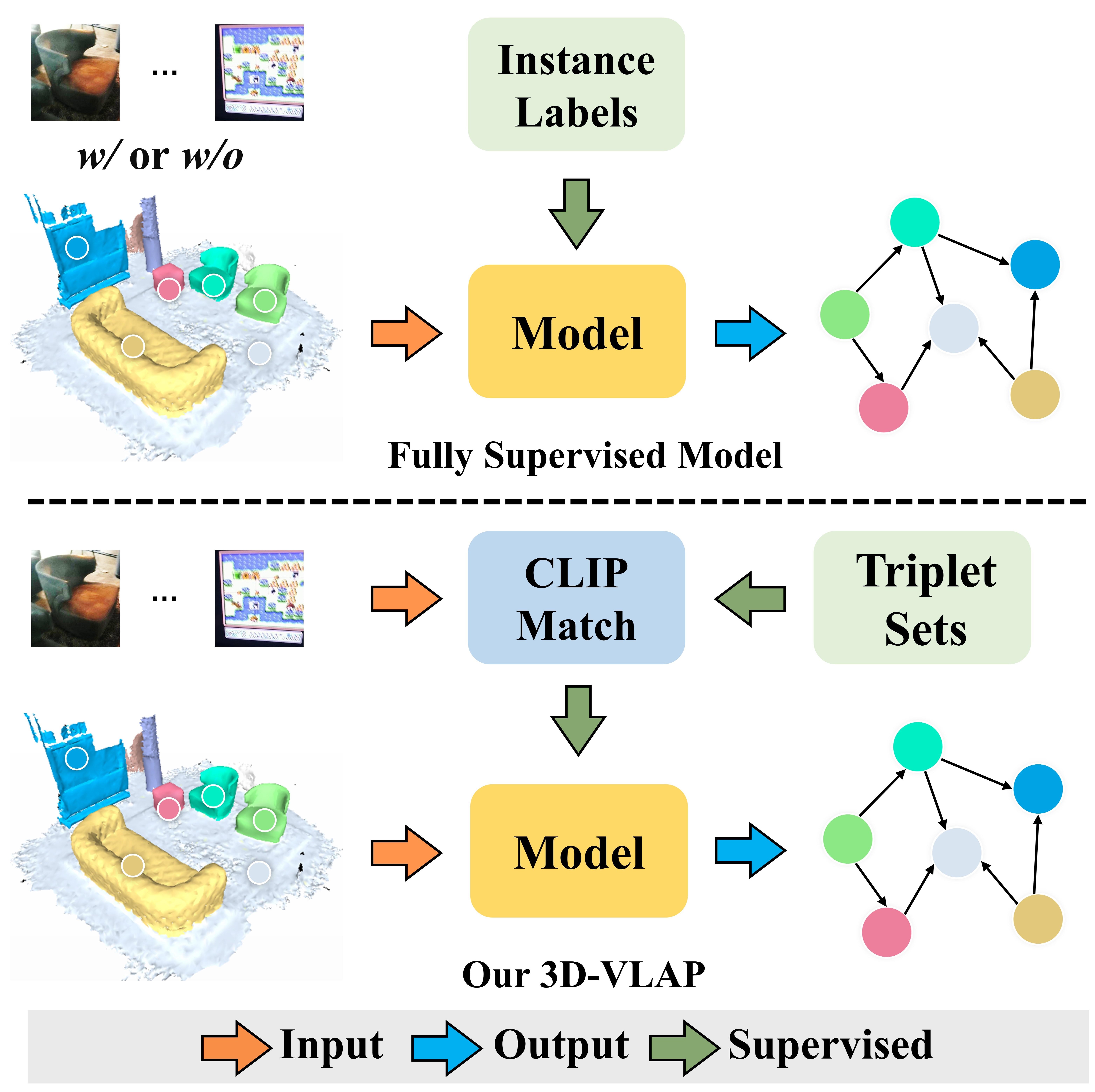
Weakly-Supervised 3D Scene Graph Generation via Visual-Linguistic Assisted Pseudo-labeling
Xu Wang, Yifan Li, Qiudan Zhang, Wenhui Wu, Mark Junjie Li, Jianmin Jinag
0
0
Learning to build 3D scene graphs is essential for real-world perception in a structured and rich fashion. However, previous 3D scene graph generation methods utilize a fully supervised learning manner and require a large amount of entity-level annotation data of objects and relations, which is extremely resource-consuming and tedious to obtain. To tackle this problem, we propose 3D-VLAP, a weakly-supervised 3D scene graph generation method via Visual-Linguistic Assisted Pseudo-labeling. Specifically, our 3D-VLAP exploits the superior ability of current large-scale visual-linguistic models to align the semantics between texts and 2D images, as well as the naturally existing correspondences between 2D images and 3D point clouds, and thus implicitly constructs correspondences between texts and 3D point clouds. First, we establish the positional correspondence from 3D point clouds to 2D images via camera intrinsic and extrinsic parameters, thereby achieving alignment of 3D point clouds and 2D images. Subsequently, a large-scale cross-modal visual-linguistic model is employed to indirectly align 3D instances with the textual category labels of objects by matching 2D images with object category labels. The pseudo labels for objects and relations are then produced for 3D-VLAP model training by calculating the similarity between visual embeddings and textual category embeddings of objects and relations encoded by the visual-linguistic model, respectively. Ultimately, we design an edge self-attention based graph neural network to generate scene graphs of 3D point cloud scenes. Extensive experiments demonstrate that our 3D-VLAP achieves comparable results with current advanced fully supervised methods, meanwhile significantly alleviating the pressure of data annotation.
4/4/2024

Weakly Supervised 3D Object Detection via Multi-Level Visual Guidance
Kuan-Chih Huang, Yi-Hsuan Tsai, Ming-Hsuan Yang
0
0
Weakly supervised 3D object detection aims to learn a 3D detector with lower annotation cost, e.g., 2D labels. Unlike prior work which still relies on few accurate 3D annotations, we propose a framework to study how to leverage constraints between 2D and 3D domains without requiring any 3D labels. Specifically, we employ visual data from three perspectives to establish connections between 2D and 3D domains. First, we design a feature-level constraint to align LiDAR and image features based on object-aware regions. Second, the output-level constraint is developed to enforce the overlap between 2D and projected 3D box estimations. Finally, the training-level constraint is utilized by producing accurate and consistent 3D pseudo-labels that align with the visual data. We conduct extensive experiments on the KITTI dataset to validate the effectiveness of the proposed three constraints. Without using any 3D labels, our method achieves favorable performance against state-of-the-art approaches and is competitive with the method that uses 500-frame 3D annotations. Code and models will be made publicly available at https://github.com/kuanchihhuang/VG-W3D.
4/24/2024

A Survey on Text-guided 3D Visual Grounding: Elements, Recent Advances, and Future Directions
Daizong Liu, Yang Liu, Wencan Huang, Wei Hu
0
0
Text-guided 3D visual grounding (T-3DVG), which aims to locate a specific object that semantically corresponds to a language query from a complicated 3D scene, has drawn increasing attention in the 3D research community over the past few years. Compared to 2D visual grounding, this task presents great potential and challenges due to its closer proximity to the real world and the complexity of data collection and 3D point cloud source processing. In this survey, we attempt to provide a comprehensive overview of the T-3DVG progress, including its fundamental elements, recent research advances, and future research directions. To the best of our knowledge, this is the first systematic survey on the T-3DVG task. Specifically, we first provide a general structure of the T-3DVG pipeline with detailed components in a tutorial style, presenting a complete background overview. Then, we summarize the existing T-3DVG approaches into different categories and analyze their strengths and weaknesses. We also present the benchmark datasets and evaluation metrics to assess their performances. Finally, we discuss the potential limitations of existing T-3DVG and share some insights on several promising research directions. The latest papers are continually collected at https://github.com/liudaizong/Awesome-3D-Visual-Grounding.
6/11/2024
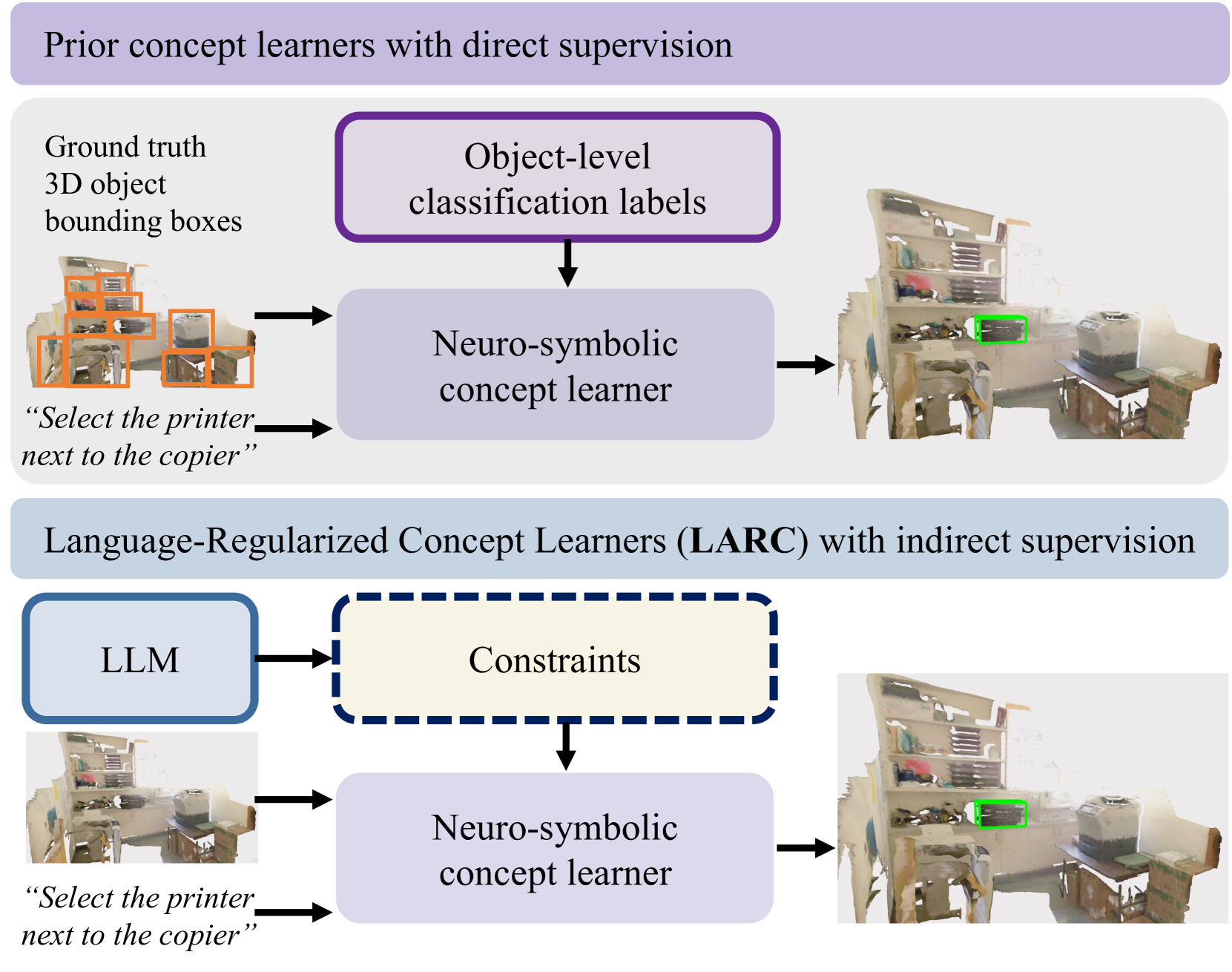
Naturally Supervised 3D Visual Grounding with Language-Regularized Concept Learners
Chun Feng, Joy Hsu, Weiyu Liu, Jiajun Wu
0
0
3D visual grounding is a challenging task that often requires direct and dense supervision, notably the semantic label for each object in the scene. In this paper, we instead study the naturally supervised setting that learns from only 3D scene and QA pairs, where prior works underperform. We propose the Language-Regularized Concept Learner (LARC), which uses constraints from language as regularization to significantly improve the accuracy of neuro-symbolic concept learners in the naturally supervised setting. Our approach is based on two core insights: the first is that language constraints (e.g., a word's relation to another) can serve as effective regularization for structured representations in neuro-symbolic models; the second is that we can query large language models to distill such constraints from language properties. We show that LARC improves performance of prior works in naturally supervised 3D visual grounding, and demonstrates a wide range of 3D visual reasoning capabilities-from zero-shot composition, to data efficiency and transferability. Our method represents a promising step towards regularizing structured visual reasoning frameworks with language-based priors, for learning in settings without dense supervision.
5/1/2024