A Pontryagin Perspective on Reinforcement Learning
2405.18100
0
0
Abstract
Reinforcement learning has traditionally focused on learning state-dependent policies to solve optimal control problems in a closed-loop fashion. In this work, we introduce the paradigm of open-loop reinforcement learning where a fixed action sequence is learned instead. We present three new algorithms: one robust model-based method and two sample-efficient model-free methods. Rather than basing our algorithms on Bellman's equation from dynamic programming, our work builds on Pontryagin's principle from the theory of open-loop optimal control. We provide convergence guarantees and evaluate all methods empirically on a pendulum swing-up task, as well as on two high-dimensional MuJoCo tasks, demonstrating remarkable performance compared to existing baselines.
Create account to get full access
Overview
- Presents a Pontryagin perspective on reinforcement learning
- Explores the connection between reinforcement learning and optimal control theory
- Provides a theoretical framework for analyzing reinforcement learning problems
Plain English Explanation
This paper examines reinforcement learning from the lens of Pontryagin's principle, a fundamental concept in optimal control theory. Reinforcement learning is a type of machine learning where an agent learns to make decisions by interacting with an environment and receiving rewards or penalties. The authors argue that reinforcement learning problems can be viewed through the Pontryagin framework, which provides a mathematical way to analyze and optimize decision-making processes.
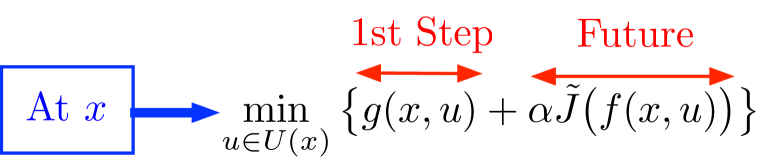
The Pontryagin principle states that the optimal solution to a control problem can be found by maximizing a Hamiltonian function, which captures the tradeoffs between the current state, the desired future state, and the actions taken to get there. The authors show how this principle can be applied to reinforcement learning, providing insights into the structure of optimal policies and the dynamics of the learning process.
By drawing this connection, the paper offers a new way of thinking about reinforcement learning that links it to the rich theory of optimal control. This perspective can lead to improved agent learning via guaranteeing certain properties, more robust value estimation, and potentially better exploration strategies for reinforcement learning agents.
Technical Explanation
The paper begins by introducing the classical reinforcement learning problem, where an agent interacts with an environment, observes the current state, and selects an action to maximize the cumulative future reward. The authors then provide background on Pontryagin's principle, which states that the optimal solution to a control problem can be found by maximizing a Hamiltonian function that captures the tradeoffs between the current state, the desired future state, and the actions taken to get there.
The core of the paper is the authors' Pontryagin perspective on reinforcement learning. They show how the Pontryagin framework can be applied to reinforcement learning problems, providing a rigorous mathematical treatment of the connections between the two fields. This includes analyzing the structure of optimal policies, the dynamics of the learning process, and the role of value functions and Hamiltonians.
The authors also discuss several implications of their Pontryagin perspective, including the potential for improved value estimation, better exploration strategies, and more robust inverse reinforcement learning. They provide examples and intuitions to illustrate these ideas and highlight the value of the Pontryagin approach for advancing reinforcement learning research.
Critical Analysis
The paper presents a novel and theoretically grounded perspective on reinforcement learning, but it is primarily focused on the mathematical framework and theoretical connections. The authors do not provide extensive empirical validation or applications of their Pontryagin approach, so the practical impact and feasibility of their ideas remain to be seen.
Additionally, the paper does not address some of the key challenges in real-world reinforcement learning, such as dealing with partial observability, sample efficiency, and scalability to complex environments. While the Pontryagin framework may offer insights into these issues, the paper does not delve into these practical considerations in depth.
Further research would be needed to demonstrate the effectiveness of the Pontryagin approach in realistic reinforcement learning problems and to explore how it can be combined with other state-of-the-art techniques to further advance the field.
Conclusion
This paper presents a Pontryagin perspective on reinforcement learning, drawing a connection between this machine learning paradigm and the well-established theory of optimal control. By viewing reinforcement learning through the lens of Pontryagin's principle, the authors offer a new theoretical framework for analyzing and optimizing reinforcement learning problems.
While the paper is primarily focused on the mathematical foundations of this approach, it opens up interesting avenues for future research. Exploring the practical applications and empirical performance of the Pontryagin perspective could lead to improved agent learning, more efficient value estimation, and better exploration strategies in reinforcement learning. Overall, this paper offers a fresh and theoretically grounded approach that has the potential to advance the state of the art in this important field of machine learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Model Predictive Control and Reinforcement Learning: A Unified Framework Based on Dynamic Programming
Dimitri P. Bertsekas
0
0
In this paper we describe a new conceptual framework that connects approximate Dynamic Programming (DP), Model Predictive Control (MPC), and Reinforcement Learning (RL). This framework centers around two algorithms, which are designed largely independently of each other and operate in synergy through the powerful mechanism of Newton's method. We call them the off-line training and the on-line play algorithms. The names are borrowed from some of the major successes of RL involving games; primary examples are the recent (2017) AlphaZero program (which plays chess, [SHS17], [SSS17]), and the similarly structured and earlier (1990s) TD-Gammon program (which plays backgammon, [Tes94], [Tes95], [TeG96]). In these game contexts, the off-line training algorithm is the method used to teach the program how to evaluate positions and to generate good moves at any given position, while the on-line play algorithm is the method used to play in real time against human or computer opponents. Significantly, the synergy between off-line training and on-line play also underlies MPC (as well as other major classes of sequential decision problems), and indeed the MPC design architecture is very similar to the one of AlphaZero and TD-Gammon. This conceptual insight provides a vehicle for bridging the cultural gap between RL and MPC, and sheds new light on some fundamental issues in MPC. These include the enhancement of stability properties through rollout, the treatment of uncertainty through the use of certainty equivalence, the resilience of MPC in adaptive control settings that involve changing system parameters, and the insights provided by the superlinear performance bounds implied by Newton's method.
6/12/2024
🏅
Provable Representation with Efficient Planning for Partial Observable Reinforcement Learning
Hongming Zhang, Tongzheng Ren, Chenjun Xiao, Dale Schuurmans, Bo Dai
0
0
In most real-world reinforcement learning applications, state information is only partially observable, which breaks the Markov decision process assumption and leads to inferior performance for algorithms that conflate observations with state. Partially Observable Markov Decision Processes (POMDPs), on the other hand, provide a general framework that allows for partial observability to be accounted for in learning, exploration and planning, but presents significant computational and statistical challenges. To address these difficulties, we develop a representation-based perspective that leads to a coherent framework and tractable algorithmic approach for practical reinforcement learning from partial observations. We provide a theoretical analysis for justifying the statistical efficiency of the proposed algorithm, and also empirically demonstrate the proposed algorithm can surpass state-of-the-art performance with partial observations across various benchmarks, advancing reliable reinforcement learning towards more practical applications.
6/12/2024
🧠
A Theoretical Framework for Partially Observed Reward-States in RLHF
Chinmaya Kausik, Mirco Mutti, Aldo Pacchiano, Ambuj Tewari
0
0
The growing deployment of reinforcement learning from human feedback (RLHF) calls for a deeper theoretical investigation of its underlying models. The prevalent models of RLHF do not account for neuroscience-backed, partially-observed internal states that can affect human feedback, nor do they accommodate intermediate feedback during an interaction. Both of these can be instrumental in speeding up learning and improving alignment. To address these limitations, we model RLHF as reinforcement learning with partially observed reward-states (PORRL). We accommodate two kinds of feedback $-$ cardinal and dueling feedback. We first demonstrate that PORRL subsumes a wide class of RL problems, including traditional RL, RLHF, and reward machines. For cardinal feedback, we present two model-based methods (POR-UCRL, POR-UCBVI). We give both cardinal regret and sample complexity guarantees for the methods, showing that they improve over naive history-summarization. We then discuss the benefits of a model-free method like GOLF with naive history-summarization in settings with recursive internal states and dense intermediate feedback. For this purpose, we define a new history aware version of the Bellman-eluder dimension and give a new guarantee for GOLF in our setting, which can be exponentially sharper in illustrative examples. For dueling feedback, we show that a naive reduction to cardinal feedback fails to achieve sublinear dueling regret. We then present the first explicit reduction that converts guarantees for cardinal regret to dueling regret. In both feedback settings, we show that our models and guarantees generalize and extend existing ones.
5/28/2024
🏅
Constrained Reinforcement Learning with Average Reward Objective: Model-Based and Model-Free Algorithms
Vaneet Aggarwal, Washim Uddin Mondal, Qinbo Bai
0
0
Reinforcement Learning (RL) serves as a versatile framework for sequential decision-making, finding applications across diverse domains such as robotics, autonomous driving, recommendation systems, supply chain optimization, biology, mechanics, and finance. The primary objective in these applications is to maximize the average reward. Real-world scenarios often necessitate adherence to specific constraints during the learning process. This monograph focuses on the exploration of various model-based and model-free approaches for Constrained RL within the context of average reward Markov Decision Processes (MDPs). The investigation commences with an examination of model-based strategies, delving into two foundational methods - optimism in the face of uncertainty and posterior sampling. Subsequently, the discussion transitions to parametrized model-free approaches, where the primal-dual policy gradient-based algorithm is explored as a solution for constrained MDPs. The monograph provides regret guarantees and analyzes constraint violation for each of the discussed setups. For the above exploration, we assume the underlying MDP to be ergodic. Further, this monograph extends its discussion to encompass results tailored for weakly communicating MDPs, thereby broadening the scope of its findings and their relevance to a wider range of practical scenarios.
6/24/2024