Towards a Robotic Intrusion Prevention System: Combining Security and Safety in Cognitive Social Robots

0
➖
Sign in to get full access
Overview
- This paper explores the importance of cybersecurity and safety for intelligent autonomous robots, specifically social robots that interact with humans.
- The researchers propose creating a Robotic Intrusion Prevention System (RIPS) to detect and mitigate cyber threats in cognitive social robot systems and other cyber-physical systems.
- The RIPS aims to preserve the privacy and safety of humans while the robotic system faces various cyber attack situations.
Plain English Explanation
As social robots become more commonplace, it's crucial that they are designed to be safe and reliable when sharing spaces with humans. This paper discusses a research project that investigates the relationship between cybersecurity and safety for intelligent autonomous robots.
The researchers have developed a novel approach called the Robotic Intrusion Prevention System (RIPS) to help detect and respond to cyber threats in cognitive social robot systems and other cyber-physical systems. The RIPS monitors the robotic communication system to identify potential threats, and then uses "System Modes" to limit the robot's functionality when a compromise is detected. This helps preserve the privacy and safety of the humans interacting with the robot, even in the face of various cyber attacks.
By addressing both cybersecurity and safety concerns, the researchers aim to create more reliable and trustworthy autonomous robots that can safely co-exist with people. This is an important step towards enabling more proactive and safe human-robot collaborations in a wide range of applications.
Technical Explanation
The paper presents the first results of a research project that seeks to enhance the safety and reliability of intelligent autonomous robots, particularly social robots that interact with humans. To achieve this, the researchers have developed a novel Robotic Intrusion Prevention System (RIPS) that follows a unique approach to detect and mitigate cyber threats in cognitive social robot systems and other cyber-physical systems.
The RIPS monitors the robotic communication system to identify potential threats, and then utilizes "System Modes" to define which parts of the robotic system should reduce or limit their functionality when the system is compromised. This approach helps preserve the privacy and safety of humans while the robot is facing various cyber attack situations.
The researchers have demonstrated the validity of their approach by applying the RIPS to a cognitive architecture running on a real social robot. This allows the robot to maintain its legibility and proactivity while also ensuring the safety of the human-robot collaboration.
Critical Analysis
The paper presents a promising approach to addressing the important challenge of ensuring the cybersecurity and safety of intelligent autonomous robots, particularly those designed to interact with humans in social settings. The RIPS system's ability to detect threats at the communication level and respond by limiting the robot's functionality is a novel and potentially effective strategy.
However, the paper does not provide a detailed evaluation of the RIPS system's performance or its ability to effectively mitigate various types of cyber attacks. Additionally, the authors do not address potential issues around the reliability and transparency of the System Modes approach, which could be a concern for users who need to trust the robot's decision-making.
Further research and testing would be needed to fully assess the RIPS system's capabilities and limitations, as well as its potential impact on the user's trust and acceptance of the robot. Incorporating feedback from human users and exploring alternative mitigation strategies could also help strengthen the overall approach.
Conclusion
This paper presents a novel Robotic Intrusion Prevention System (RIPS) that aims to enhance the cybersecurity and safety of intelligent autonomous robots, particularly social robots that interact with humans. By monitoring robotic communication and using System Modes to limit functionality during a detected compromise, the RIPS seeks to preserve the privacy and safety of human users.
While the proposed approach shows promise, further research and evaluation are needed to fully understand its capabilities and limitations. Addressing concerns around reliability, transparency, and user trust will be critical for enabling more safe and proactive human-robot collaborations in a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
➖
0
Towards a Robotic Intrusion Prevention System: Combining Security and Safety in Cognitive Social Robots
Francisco Mart'in, Enrique Soriano-Salvador, Jos'e Miguel Guerrero, Gorka Guardiola M'uzquiz, Juan Carlos Manzanares, Francisco J. Rodr'iguez
Social Robots need to be safe and reliable to share their space with humans. This paper reports on the first results of a research project that aims to create more safe and reliable, intelligent autonomous robots by investigating the implications and interactions between cybersecurity and safety. We propose creating a robotic intrusion prevention system (RIPS) that follows a novel approach to detect and mitigate intrusions in cognitive social robot systems and other cyber-physical systems. The RIPS detects threats at the robotic communication level and enables mitigation of the cyber-physical threats by using System Modes to define what part of the robotic system reduces or limits its functionality while the system is compromised. We demonstrate the validity of our approach by applying it to a cognitive architecture running in a real social robot that preserves the privacy and safety of humans while facing several cyber attack situations.
Read more7/10/2024
🖼️
0
New!Securing the Future: Exploring Privacy Risks and Security Questions in Robotic Systems
Diba Afroze, Yazhou Tu, Xiali Hei
The integration of artificial intelligence, especially large language models in robotics, has led to rapid advancements in the field. We are now observing an unprecedented surge in the use of robots in our daily lives. The development and continual improvements of robots are moving at an astonishing pace. Although these remarkable improvements facilitate and enhance our lives, several security and privacy concerns have not been resolved yet. Therefore, it has become crucial to address the privacy and security threats of robotic systems while improving our experiences. In this paper, we aim to present existing applications and threats of robotics, anticipated future evolution, and the security and privacy issues they may imply. We present a series of open questions for researchers and practitioners to explore further.
Read more9/17/2024
0
New!Real-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration
Damian Hostettler, Simon Mayer, Jan Liam Albert, Kay Erik Jenss, Christian Hildebrand
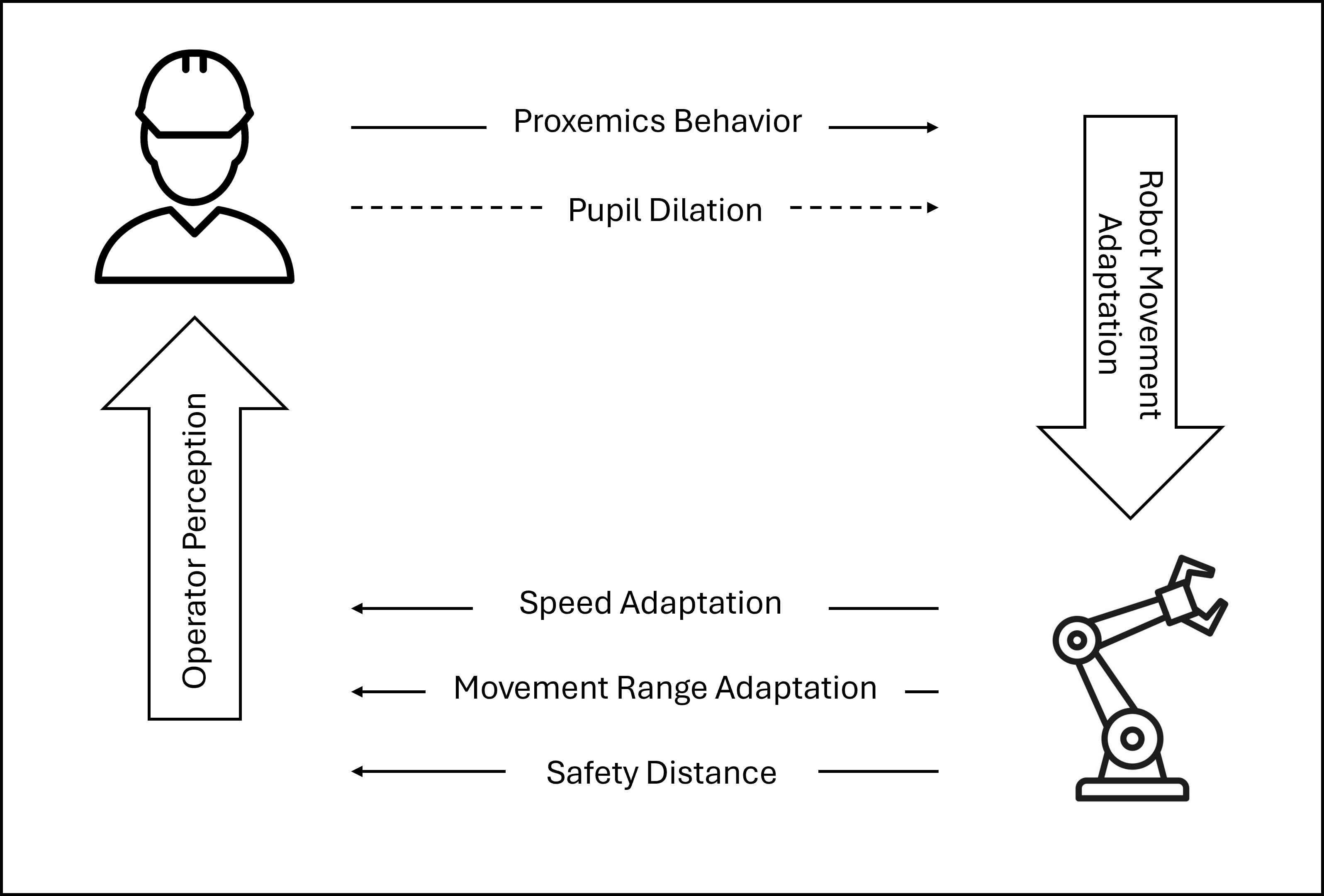
Industrial robots become increasingly prevalent, resulting in a growing need for intuitive, comforting human-robot collaboration. We present a user-aware robotic system that adapts to operator behavior in real time while non-intrusively monitoring physiological signals to create a more responsive and empathetic environment. Our prototype dynamically adjusts robot speed and movement patterns while measuring operator pupil dilation and proximity. Our user study compares this adaptive system to a non-adaptive counterpart, and demonstrates that the adaptive system significantly reduces both perceived and physiologically measured cognitive load while enhancing usability. Participants reported increased feelings of comfort, safety, trust, and a stronger sense of collaboration when working with the adaptive robot. This highlights the potential of integrating real-time physiological data into human-robot interaction paradigms. This novel approach creates more intuitive and collaborative industrial environments where robots effectively 'read' and respond to human cognitive states, and we feature all data and code for future use.
Read more9/17/2024

0
New!Robots that Learn to Safely Influence via Prediction-Informed Reach-Avoid Dynamic Games
Ravi Pandya, Changliu Liu, Andrea Bajcsy
Robots can influence people to accomplish their tasks more efficiently: autonomous cars can inch forward at an intersection to pass through, and tabletop manipulators can go for an object on the table first. However, a robot's ability to influence can also compromise the safety of nearby people if naively executed. In this work, we pose and solve a novel robust reach-avoid dynamic game which enables robots to be maximally influential, but only when a safety backup control exists. On the human side, we model the human's behavior as goal-driven but conditioned on the robot's plan, enabling us to capture influence. On the robot side, we solve the dynamic game in the joint physical and belief space, enabling the robot to reason about how its uncertainty in human behavior will evolve over time. We instantiate our method, called SLIDE (Safely Leveraging Influence in Dynamic Environments), in a high-dimensional (39-D) simulated human-robot collaborative manipulation task solved via offline game-theoretic reinforcement learning. We compare our approach to a robust baseline that treats the human as a worst-case adversary, a safety controller that does not explicitly reason about influence, and an energy-function-based safety shield. We find that SLIDE consistently enables the robot to leverage the influence it has on the human when it is safe to do so, ultimately allowing the robot to be less conservative while still ensuring a high safety rate during task execution.
Read more9/19/2024